
Addition of vectors: If two scalars are added resulting scalar will be unique which will be equal to sum of the given two scalars.For examples if two scalars 2 and 8 are added their sum will be always equal to 2+8 =10.
But, the addition of vectors is complicated.If we add two vectors of magnitudes 2 and 8 the resultant vector’s magnitude will be 6 or 10 or any value between 6 and 10 depending on the directions of the vectors we are adding.
i) If the two given vectors are acting in same direction then the magnitude of the resultant vector will be 10 units,
ii) If the two given vectors are acting in opposite directions then the magnitude of resultant vector will be 6 units,
iii) If the two given vectors are acting in different directions then the magnitude of the resultant vector will be between 6 and 10.
How to add two given vectors(Geometrical representation): Suppose  and
and  are two given vectors.
are two given vectors.
and are two given vectors.i)If the two vectors are acting in the same direction,take the first vector Suppose , to the terminal point of connect the initial point of .
, to the terminal point of connect the initial point of .We get + =  .
.
+ = .
The magnitude of resultant vector will be equal to the sum of magnitudes of and
and i.e When two vectors are acting in same direction the “sum of the magnitudes of the vectors = Magnitude of resultant vector”
AB+CD = AD
ii)If the two vectors are acting in different directions in that case the procedure of addition will be same but the direction and magnitude of resultant vector will be different.Suppose and are two given vectors acting in different directions as shown in the below fig(a).
and are two given vectors acting in different directions as shown in the below fig(a).
To add these two vectors connect the initial point C of IInd vectors to the terminal point B of First vector .Now join the initial point A of first vector with the terminal point D of the second vector .The vector taken in reverse order (closing side taken in reverse order) represents the resultant vector both in magnitude and direction.
to the terminal point B of First vector .Now join the initial point A of first vector with the terminal point D of the second vector .The vector taken in reverse order (closing side taken in reverse order) represents the resultant vector both in magnitude and direction.
I.e When two vectors are acting in different directions the “Sum of the magnitudes of the vectors > Magnitude of resultant vector”.
Laws of vector addition:
i) Vector addition is commutative  +
+  = +
= +
+ = + Proof:Suppose  = and = are two given vectors.Now let us add these two vectors. To add
= and = are two given vectors.Now let us add these two vectors. To add
= and = are two given vectors.Now let us add these two vectors. To addthem let us connect the initial position of to the terminal point of in anti clock wise direction,now closing side OB taken in the reverse order represents the resultant vector  .
.
to the terminal point of in anti clock wise direction,now closing side OB taken in the reverse order represents the resultant vector .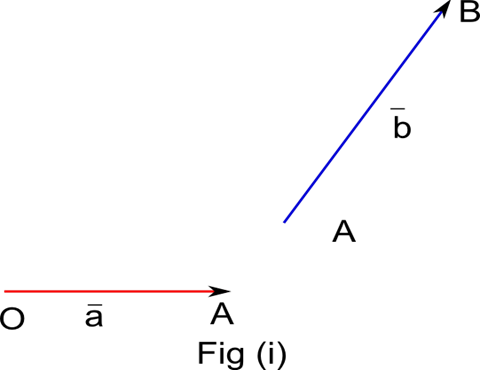

Now draw a vectors parallel to and and complete the parallelogram OABC.From the Fig(ii)  = = and =
= = and =  = .
= .
and and complete the parallelogram OABC.From the Fig(ii) = = and = = .From triangle OAB + = 
+ = i.e + = – - – - – - – - – - – - (1)
+ = – - – - – - – - – - – - (1)From triangle OCB + =
+ = i.e + = – - – - – - – - – - – - (2)
+ = – - – - – - – - – - – - (2)from eq(1) and (2) we get + = +
+ = + Hence vector addition is commutative.
ii) Vector addition is associative: Let = , = and  =
=  be three different vectors.
be three different vectors.
= , = and = be three different vectors.

To add the given three vectors , and we have to connect the initial point of to the terminal point of and the initial point of to terminal point of .The closing side taken in reverse order represents the resultant vector.
, and we have to connect the initial point of to the terminal point of and the initial point of to terminal point of .The closing side taken in reverse order represents the resultant vector.Hence resultant = .
= .Proof:To add three vectors we have to first add two vectors and to sum vector we will add the third vector.
Form fig(ii) from the triangle OAB + = = ( + ) – - – (1)
+ = = ( + ) – - – (1)from triangle OBC + = = – - – - – - – - – - – - (2)
+ = = – - – - – - – - – - – - (2)substitute the value and = ( + ) from eq(1) to eq(2)
and = ( + ) from eq(1) to eq(2)we get ( + ) + = = – - – - - -(A)
+ ) + = = – - – - - -(A)From triangle ABC + = 
+ = i.e ( + ) = – - – - – - – - – (3)
+ ) = – - – - – - – - – (3)From triangle OAC + = = – - – - – - – - (4)
+ = = – - – - – - – - (4)solving eq(3) and eq(4) we get + ( + ) = = – - – - – - – (B)
+ ( + ) = = – - – - – - – (B)Comparing eq(A) & eq(B) we get ( + ) + = + ( + )
+ ) + = + ( + )Hence,vector addition is associative.
Subtraction of Vectors: Subtraction of vectors is also a form of addition.Addition of two vectors acting in opposite direction is called subtraction of vectors.
Suppose as in fig(i) = and = are two vectors, to subtract from we have to add the negative vector of to , i.e – = + ( -).
= and = are two vectors, to subtract from we have to add the negative vector of to , i.e – = + ( -).
In the fig (ii) we have drawn  = (-) negative vector of = , now connect the initial point of
= (-) negative vector of = , now connect the initial point of
= (-) negative vector of = , now connect the initial point oflatex \overline{BE}$ to the terminal point of . From the resultant vector of addition of these two vectors is  .
.
. From the resultant vector of addition of these two vectors is .Therefore + =
+ = i.e + (- ) = – = .
+ (- ) = – = .* Subtraction of vectors is not commutative –  –
–
– – 
17/05/2011
VECTORS
Physical quantities are classified in to two categories i) Scalar quantities ii)Vector quantities
1. Scalar quantities or Scalars :The physical quantities which have magnitude but no direction are called scalar quantities or scalars.
Ex:Length,mass,time,area,volume,speed,energy,work,temperature etc
2.Vector quantities or Vectors:The physical quantities which posses magnitude as well as direction are called Vector quantities or Vectors.
Ex:Displacement,velocity,acceleration,momentum,force etc
Geometrical representation of vectors :A vector is geometrically represented by a directed line segment. The length of the directed line segment is called magnitude of the vector and the direction of the line segment represents the direction of the vector quantity. 

Ex: If a body starts from a point O after traveling for certain time it reaches its destination point A.Then the displacement of the body is represented by the directed line segment OA . The Length of the straight line OA represents the magnitude of the displacement of the body, and the direction of the line segment from O towards A represents the direction of displacement of the body. Vector is read as AB bar.The magnitude of is written as  and read as modulus of .
and read as modulus of .
is read as AB bar.The magnitude of is written as and read as modulus of .Types of Vectors :
1.Co-initial vectors: All those vectors whose initial points are same, such vectors are called co initial vectors.  Ex: OA,OB,OC, OD ,OE all these vectors have initial point O. Hence these are co-initial vectors.
Ex: OA,OB,OC, OD ,OE all these vectors have initial point O. Hence these are co-initial vectors.
 Ex: OA,OB,OC, OD ,OE all these vectors have initial point O. Hence these are co-initial vectors.
Ex: OA,OB,OC, OD ,OE all these vectors have initial point O. Hence these are co-initial vectors.2.Co-terminal vectors :All those vectors whose terminal (end) points are same,such vectors are called co terminal vectors. 

Ex: The terminal point of all these vectors  ,
, ,
, ,
, is Same point P. Hence, these vectors are called co-terminal vectors.
is Same point P. Hence, these vectors are called co-terminal vectors.
,, , is Same point P. Hence, these vectors are called co-terminal vectors.3. Coplanar Vectors:The vectors which lie in the same plane are called Co-planar Vectors.


Ex:a) All the vectors which lie in XY plane are called coplanar irrespective of their magnitudes
and directions. b) all the vectors which lie in YZ plane are coplanar with respect to one another.
4.Null vectors: Any vector which has direction but no magnitude is called a null vector. For a null
vector its initial point and the terminal point will be same .
Ex:  ,
, .
.  ………………. Are null vectors.
………………. Are null vectors.
, . ………………. Are null vectors.5.Unit Vector: Any vector of unit magnitude is called unit vector.If is a vector,it’s unit vector is denoted by  .This () is read as a cap.
.This () is read as a cap.
is a vector,it’s unit vector is denoted by .This () is read as a cap.If you divide a vector with its magnitude we get the unit vector of that vector.
Therefore unit vector = latex \bar(a)$}{
latex \bar(a)$}{ }$
}$
=latex \bar(a)$}{}$where is called the magnitude of vector.
is called the magnitude of vector.Every vector will have its own unit vector.Unit vector of any vector will be of unit magnitude irrespective of the magnitude of the original vector.
If is a vector its unit vector will be  ,the direction of and will be same.Similarly if is a vector its unit vector will be
,the direction of and will be same.Similarly if is a vector its unit vector will be  ,the direction of and will be same.
,the direction of and will be same.
is a vector its unit vector will be ,the direction of and will be same.Similarly if is a vector its unit vector will be ,the direction of and will be same.Three mutually perpendicular axes OX,OY AND OZ form the Cartesian co-ordinate system.The unit vectors along X,Y and Z axis are represented by  ,
, and
and  respectively.
respectively.
, and respectively.6.Like vectors : All the vectors acting in the same direction are called like vectors.
 The given vectors and
The given vectors and 
are acting in the same direction ,hence and are like vectors.
and are like vectors.Note: Like vectors will be always i)parallel to one another ii) will be acting in the same direction , but iii)not necessarily be of the different magnitudes.
7. Unlike Vectors : Any two vectors parallel to one another and acting in opposite directions are called unlike vectors.

The given vectors and are acting in the opposite directions , hence and are unlike vectors.
and are acting in the opposite directions , hence and are unlike vectors.Note: Unlike vectors will be always i)parallel to one another ii) will be acting in the opposite directions , but iii)not necessarily be of the different magnitudes.
8. Negative Vector : If = is a vector,then = - will be the negative vector of .
= is a vector,then = - will be the negative vector of . i)The original vector and it’s negative vector - will be of same magnitude i.e =
i)The original vector and it’s negative vector - will be of same magnitude i.e =  ii) they will be opposite to one another. iii) every vector will have a negative vector.
ii) they will be opposite to one another. iii) every vector will have a negative vector.9. Axial Vectors or (One dimensional Vectors) : The vectors acting along X,Y or Z axes ( or) vectors parallel to any one of the Axis are called axial vectors (or) one dimensional vectors.
9(i). Vectors parallel to X axis : In the Fig(1) all the vectors = , = and
= , = and
 = are parallel to X axis. These vectors , and are called axial vectors parallel to X-axis. If the magnitudes of vectors , and are =a ,
= are parallel to X axis. These vectors , and are called axial vectors parallel to X-axis. If the magnitudes of vectors , and are =a , =b and ,
=b and , = c ,then we can represent the axial vectors as = a , = b and = c .
= c ,then we can represent the axial vectors as = a , = b and = c .Ex: i)5 is a vector of 5units magnitude working along X-axis or parallel to X-axis in positive direction. ii) 8/5 is a vector of 8/5 units magnitude working along X-axis or parallel to X-axis in positive direction. iii) -9 is a vector of 9units magnitude working along X-axis or parallel to X-axis in negative direction. iv)a is a vector of a units magnitude working along X-axis or parallel to X-axis in positive direction.
is a vector of 5units magnitude working along X-axis or parallel to X-axis in positive direction. ii) 8/5 is a vector of 8/5 units magnitude working along X-axis or parallel to X-axis in positive direction. iii) -9 is a vector of 9units magnitude working along X-axis or parallel to X-axis in negative direction. iv)a is a vector of a units magnitude working along X-axis or parallel to X-axis in positive direction.9(ii). Vectors parallel to Y axis : In the Fig(2) all the vectors = , = and
= , = and  = are parallel to Y axis. These vectors , and are called axial vectors parallel to Y-axis. If the magnitudes of vectors , and are =a , =b and , = c ,then we can represent the axial vectors as = a , = b and = c .
= are parallel to Y axis. These vectors , and are called axial vectors parallel to Y-axis. If the magnitudes of vectors , and are =a , =b and , = c ,then we can represent the axial vectors as = a , = b and = c .Ex: i)3 is a vector of 3units magnitude working along Y-axis or parallel to Y-axis in positive direction. ii) 5/3 is a vector of 5/3units magnitude working along Y-axis or parallel to Y-axis in positive direction. iii) -7 is a vector of 7units magnitude working along Y-axis or parallel to Y-axis in negative direction. iv)b is a vector of b units magnitude working along Y-axis or parallel to Y-axis in positive direction.
is a vector of 3units magnitude working along Y-axis or parallel to Y-axis in positive direction. ii) 5/3 is a vector of 5/3units magnitude working along Y-axis or parallel to Y-axis in positive direction. iii) -7 is a vector of 7units magnitude working along Y-axis or parallel to Y-axis in negative direction. iv)b is a vector of b units magnitude working along Y-axis or parallel to Y-axis in positive direction.9(iii). Vectors parallel to Z axis : In the Fig(3) all the vectors = , = and
= , = and  = are parallel to Z axis. These vectors , and are called axial vectors parallel to Z-axis. If the magnitudes of vectors , and are =a , =b and , = c ,then we can represent the axial vectors as = a , = b and = c .
= are parallel to Z axis. These vectors , and are called axial vectors parallel to Z-axis. If the magnitudes of vectors , and are =a , =b and , = c ,then we can represent the axial vectors as = a , = b and = c .Ex: i)6 is a vector of 6units magnitude working along Z-axis or parallel to Z-axis in positive direction. ii) 8/5 is a vector of 8/5 units magnitude working along Z-axis or parallel to Z-axis in positive direction. iii) -4 is a vector of 4units magnitude working along Z-axis or parallel to Z-axis in negative direction. iv)c is a vector of c units magnitude working along Z-axis or parallel to Z-axis in positive direction.
is a vector of 6units magnitude working along Z-axis or parallel to Z-axis in positive direction. ii) 8/5 is a vector of 8/5 units magnitude working along Z-axis or parallel to Z-axis in positive direction. iii) -4 is a vector of 4units magnitude working along Z-axis or parallel to Z-axis in negative direction. iv)c is a vector of c units magnitude working along Z-axis or parallel to Z-axis in positive direction.10.Two dimensional vectors (or) Plane vectors:The vectors acting in XY-Plane or YZ-Plane or ZX-Plane are known as two dimensional vectors or also known as vectors in a plane.
10(i).Vectors in XY-Plane: In the given Fig(i) = is a vector working in XY-Plane.It’s X-component is  and Y component is
and Y component is  .So we can express the given vector as the sum of the component vectors.
.So we can express the given vector as the sum of the component vectors.
= is a vector working in XY-Plane.It’s X-component is and Y component is .So we can express the given vector as the sum of the component vectors. = + . There fore the vectors acting in XY-Plane will have only two components X-component and Y-component.These XY-plane vectors can also be represented in Cartesian co-ordinate form. =( , , 0).
There fore the vectors acting in XY-Plane will have only two components X-component and Y-component.These XY-plane vectors can also be represented in Cartesian co-ordinate form. =( , , 0).Note: If X,Y co-ordinates exists(not equal to zero) and the Z co-ordinates does not exist(=0), such vectors will be in XY plane.
10(ii).Vectors in YZ-Plane: In the given Fig(ii) = is a vector working in YZ-Plane.It’s Y-component is and Z component is  .So we can express the given vector as the sum of the component vectors.
.So we can express the given vector as the sum of the component vectors.
= is a vector working in YZ-Plane.It’s Y-component is and Z component is .So we can express the given vector as the sum of the component vectors. = + .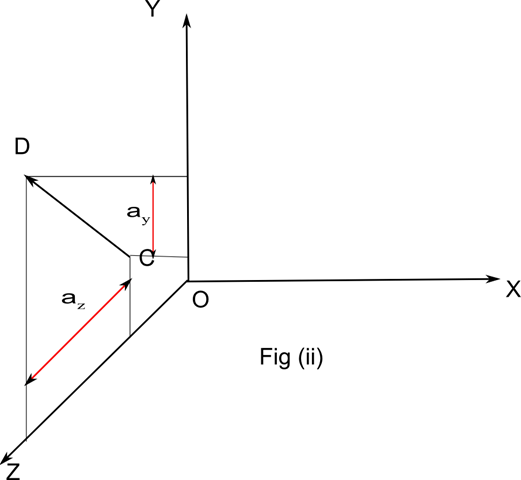
There fore the vectors acting in YZ-Plane will have only two components Y-component and Z-component.These YZ-plane vectors can also be represented in Cartesian co-ordinate form. =(0, , ).
=(0, , ).Note: If Y,Z co-ordinates exists(not equal to zero) and the X co-ordinates does not exist(=0), such vectors will be in YZ plane.
10(iii).Vectors in XZ-Plane:
In the given Fig(i) = is a vector working in XZ-Plane.It’s X-component is and Z component is .So we can express the given vector as the sum of the component vectors.
= is a vector working in XZ-Plane.It’s X-component is and Z component is .So we can express the given vector as the sum of the component vectors. = + .
There fore the vectors acting in XZ-Plane will have only two components X-component and Z-component.These XZ-plane vectors can also be represented in Cartesian co-ordinate form. =( ,0, ).
=( ,0, ).Note: If X,Z co-ordinates exists(not equal to zero) and the Y co-ordinates does not exist(=0), such vectors will be in XZ plane.
11.Space Vector: If any vector possess components along all the three axes X,Y and Z such vectors are called space vectors.
= + + .These space vectors can also be represented in Cartesian co-ordinate form. =( ,, ). In the given fig
In the given fig  is a space vector .Where OC = , OA = and OG = .Hence = = + + .
is a space vector .Where OC = , OA = and OG = .Hence = = + + .
0 comments:
Post a Comment